

Здравия, дорогой читатель!
Сразу оговорюсь. Этот мини-проект делает мой коллега. Публикую это с его разрешения и желания довести до общественности. Если многим будет интересно, то будет и продолжение. Также, здравые вопросы не останутся без ответа. Далее следует сугубо авторский текст.
«Давным-давно, в далекой-далекой галактике.»(с), а если серьезно, то давно хотелось собрать какого-нибудь робота, да вот руки никак не доходили. И тут свершилось: есть модель танка, подходящие микросхемы и время (О_о) (ага в WOT надо меньше играть).
Подопытный: Модель Т34 масштабом 1:48, доставленная из Южной Кореи.

В описании модели указано «… MOTORIZED 2CH R/C». Собственно это редуктор с парой двигателей – для каждой гусеницы свой.

Экипаж танка: «Командир танка» — Atmega8PU, «Радист» — HC-06, «Механик водитель» — L293D, «Заряжающий» и «Наводчик» отказались участвовать.
На принципе работы микросхемы L293D останавливаться не буду, подробности можно найти, например, тут. Как оказалось, двигатели модели не хотели стартовать, видите ли, им тока не хватало (у драйвера максимум 600 мА на канал). Пришлось заменить их на QX-FF-130-11340. Эти движки не настолько привередливые.
С направлением вращения вроде как понятно: подал на соответствующие выводы 0 или 1, и драйвер понял в какую сторону крутить. Используем, PC0, PC1, PC3 и PC4 — для регулировки направления вращения двигателей. А вот как регулировать скорость вращения? На помощь приходит ШИМ, подробности, например, тут. Его (ШИМ) будет генерировать таймер T2 в режиме Fast PWM (для моих целей достаточно). PB3 он же OC2 – вывод который можно соединить с таймером Т2. Он то и будет передавать ШИМ на ноги драйвера, которые отвечают за вкючениевыключение двигателей.
Теперь осталось решить, как передавать команды «Командиру». Хм, Atmega8PU способен общаться по UART. А кто еще так может, да еще и по воздуху? Правильно Bluetooth модуль HC-06.
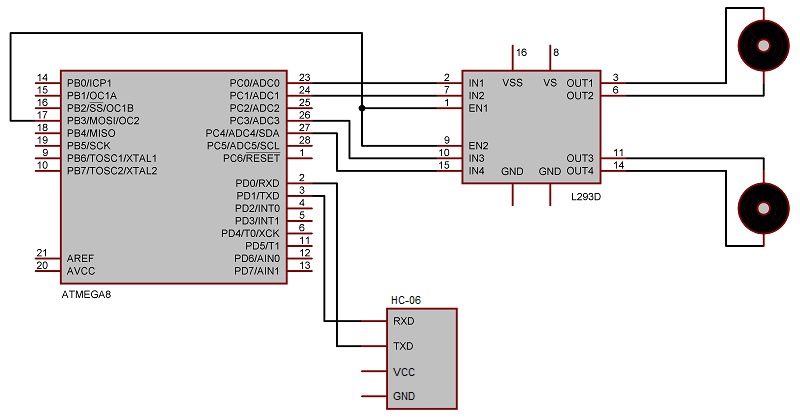
Мысли в кучу и вот принципиальная схема:
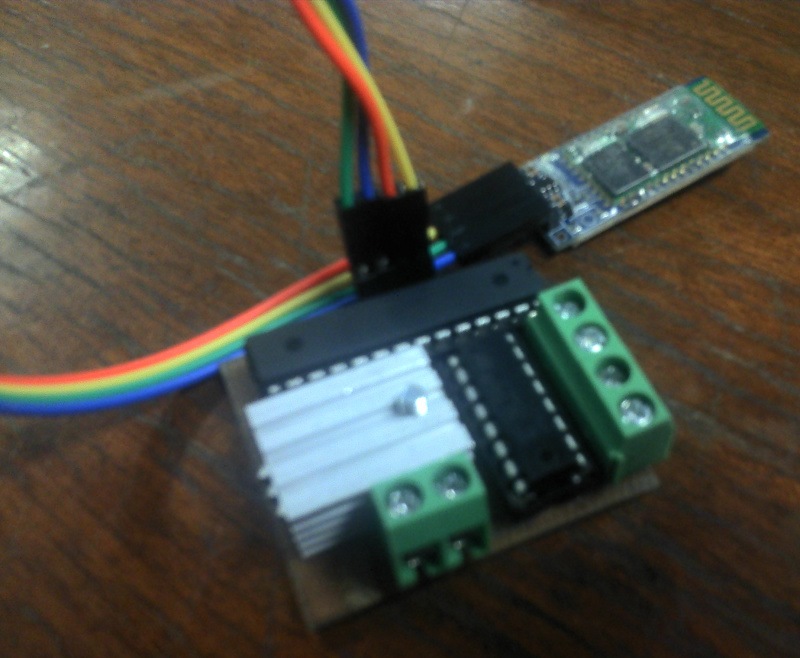
Теперь воплощаю схему в жизнь, пока на макетной плате.
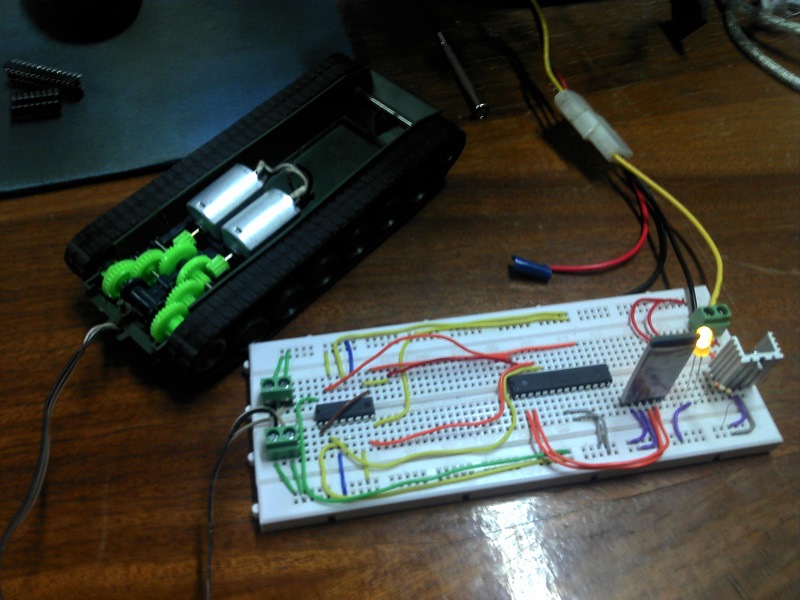
Пока в качестве источника питания выступает компьютерный БП – тут и 5В есть и 12. Но танк то должен быть беспроводной, следовательно, будет батарейка, и значит нужно разделить питание. Для этой цели использую стабилизатор LM7805, он как раз 5В выдает.
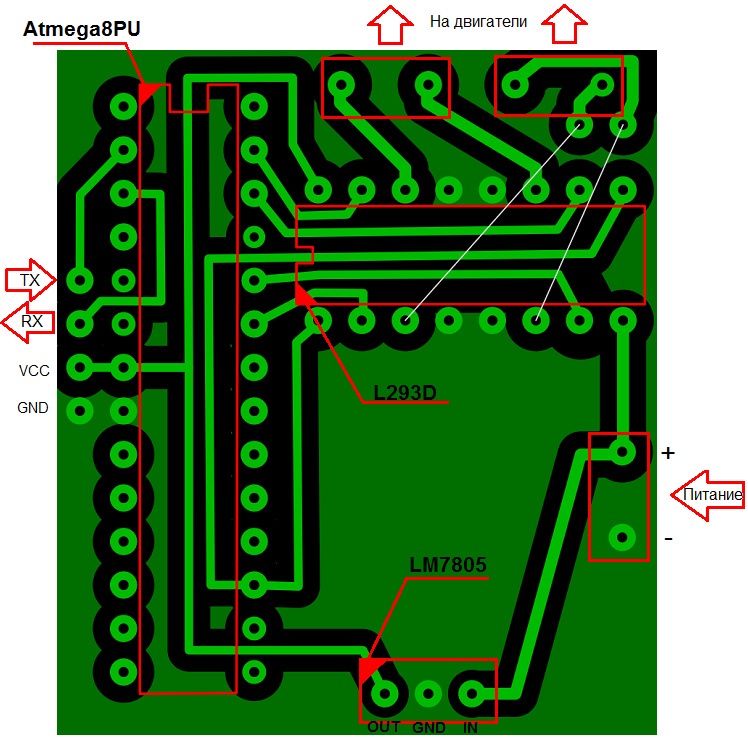
Отлично, все работает как часы. Теперь не плохо бы было поместить «экипаж» непосредственно в танк. Свободного места в корпусе мало, всего 5х4 см. Значит, плата должна быть маленькая. Повозившись в Sprint-Layout v6, получил это:
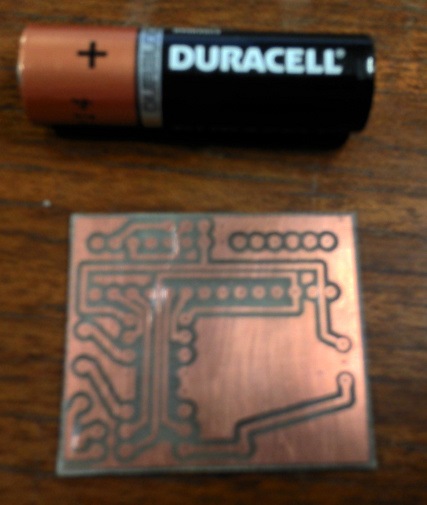
С помощью ЛУТа появляется плата:

Наступает волнительный момент. Сажаю «экипаж» в танк, подаю питание, командую – вперед! Ура, он начинает двигаться, но как-то странно – периодически останавливается, приходится повторять команду по несколько раз. Что за ерунда, на макете же все работало? Опытным путем было выяснено что «Командира» иногда контузит, т.е. Atmega8 периодически перезагружается. С чего бы вдруг? Оказывается, дело было не в бабине …, ну Вы поняли). Для начала не плохо бы было почитать мат. часть, а уже потом проектироваться.
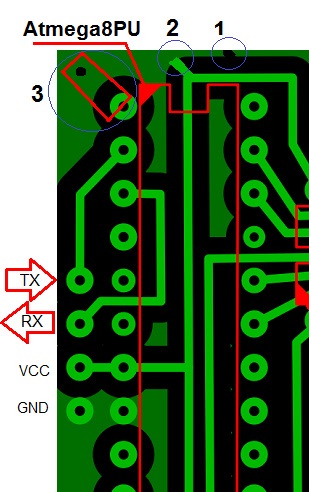
Но уже поздно, пробую хоть как-нибудь исправить это. Напаял на двигатели керамические конденсаторы по 0,1 мкФ. Ножку RESET не плохо бы к питанию притянуть через резистор в 10КОм. Для этого изолирую уголок от земли (1), связываю полученную площадку (2) с питанием и добавляю резистор (3).
Контроллер все равно иногда перезагружается. Хотя и не так часто как раньше. В принципе, можно погрешать прошивкой. Ладно, это не баг, это фитча. И, очень вероятно, что перезагрузок не будет, когда питать танк будет батарея.
Комплектующие:
1. Модель танка Т34 – 1 шт.
2. Atmega8PU – 1 шт.
3. Модуль HC-06 – 1 шт.
4. Драйвер L293D – 1 шт.
5. Стабилизатор LM7805 – 1 шт.
6. Электродвигатель QX-FF-130-11340 3 — 12V – 2 шт.
7. Керамические конденсатор 0,1 мкФ – 2 шт.
8. Резистор 10 Ком – 1 шт.
Как общаться с «командиром»
На контроллер можно послать любой символ (1 байт). Есть символы-команды, и есть все остальные. Если пришла команда – она выполняется, иначе – просто игнорируется.
Символы-команды:
“q” – левая гусеница вперед
“w” – правая гусеница вперед
“a” – левая гусеница стоп
“s” – правая гусеница стоп
“z” – левая гусеница назад
“x” – правая гусеница назад
“0” – мощность двигателей 0 (обе гусеницы стоп)
“1” – мощность двигателей 25%
“2” – мощность двигателей 50%
“3” – мощность двигателей 75%
“4” – мощность двигателей 100%
Дальше контроллер посылает “!” (Вас слышу). Если последний символ поступил секунду назад, то контроллер отправляет “?” (Прием? Как слышно?). На ответ дается 1 сек. Если в течение этой секунды не поступило ни одного символа, танк останавливается.

Чтобы ваша жизнь всегда была яркой нужно оставаться ребенком. Вот пример неунывающего по жизни пенсионера, выйдя на пенсию он вплотную занялся конструированием радиоуправляемых танков. Данное занятие прибавляет ему бодрости и энергичности. Автор с детства увлекался моделированием, коллекционированием военной бронетехники, а теперь имея много свободного времени создает радиоуправляемую боевую машину.
Данная затея очень непроста, требует много времени и труда, как физического так и умственного.
Мастер не долго размышлял какую модель будет собирать, конечно же легендарный Советский танк Т-34-85.
Во время Отечественной войны Немцы люто боялись маневренного и быстрого Русского танка.
Собирая модель автор учел все тонкости и нюансы данной машины.
Что же давайте перейдем непосредственно к самой сборке, но перед этим ознакомьтесь с перечнем инструментов и материалов необходимых для создания легенды.
Материалы
1) фанера
2) колеса
3) ось
4) стекловолокно
5) болты
6) редуктор
7) аккумуляторы
8) провода
9) уголок
10) клей
Инструменты
1) циркулярная пила
2) электолобзик
3) набор гаечных ключей
4) дрель
5) паяльник
6) молоток
7) струбцины
8) линейка
9) напильник
10) отвертка
Всем доброго времени суток!
Представляю вашему вниманию модель легендарного советского Танка Т-72.

Всем привет,меня зовут Леонид и я представляю вашему вниманию своё творение.
Наверняка многие в детстве хотели быть лётчиками ,косманавтами или гонщиками F-1, а у меня была мечта иметь собственный танк.
Идея создать танк была давно,но не было хороших чертежей. Тогда руководитель писал письмо на завод изготовителя с целью, что бы выделили чертежи. Когда пришли чертежи, мы подогнали их под нужный мне масштаб, работа пошла полным ходом.
(Чертёж взят из интернета)
Многие задавали мне вопрос: "Почему выбрал именно масштаб 1:16 ,а не 18 или 10?"
Ответ прост: "масштаб зависим от гусениц. "
Ещё при Советском Союзе руководитель делал пресс формы и заказывал на заводе траки. Тогда это можно было сделать без проблем, не так как сейчас.
Гусеницы было решено сделать из дюраля,материал самый подходящий, лёгкий и прочный.
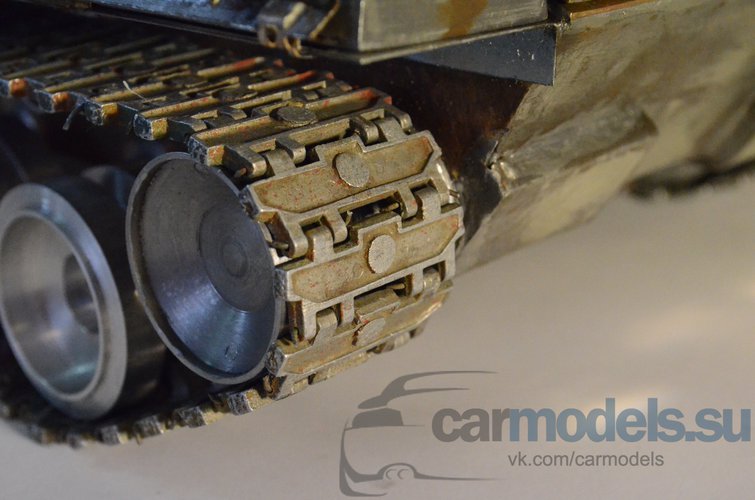
Катки на танк точил сам на токарном станке, много же тогда дюрали ушло)
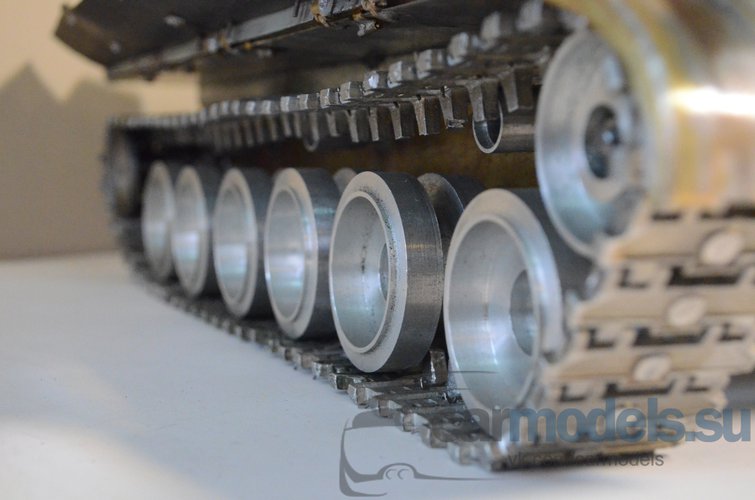
Подвеска на танке действующая.
Сделан ленивец для натяжении гусениц.
Ведущий каток (задний) ещё в дорабодке,будет обтачиваться до звёздочки.
В движение танк приводят 2 коллекторных мотора (540), соединенных с планитарными редукторами.
Башню пришлось делалась по деревянной болванке, что бы точно повторить все плавные формы оригинала.

В башне стоит рулёвка для поднятия/опускания ствола
Так же стоит рулёвка для поворота башни на 360 градусов
Сделан механизм, что бы танк стрелял, но он нуждается в доработке
Как сделать, чтоб пушка стреляла, нам подсказал Константин (Konst):
"Если красочно – ствол потолще и китайские петарды с системой электроподжига, система смены заряда – револьверного типа (барабан с петардами внутри башни). При срабатывании – большой бабах и половина петарды вылетает через ствол (обычно их рвет пополам)."
Огромное ему спасибо за это!
Как стреляем танк смотрите в конце видео
(правда оно старое)
Немного фотографий с деталировкой танка:













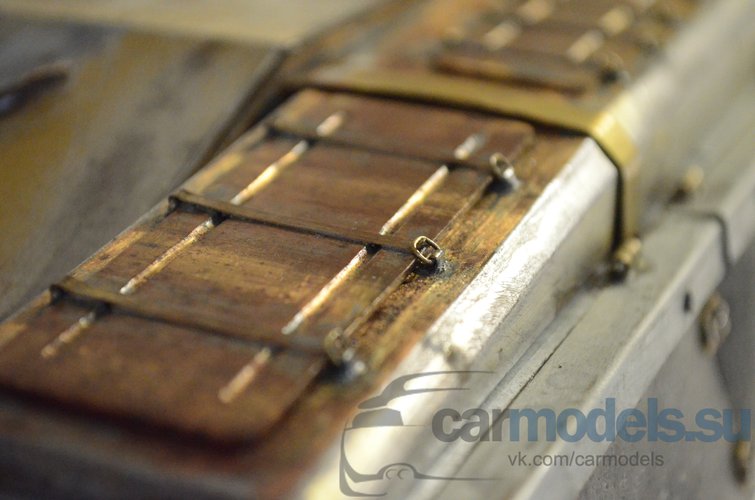






Копийность этой модели на высоком уровне, на ней сделаны самые мелкие детали, все с максимальной точностью. Но пока модель еще не готова к финальным этапам, она требует очень крупных и масштабных доработок.
Надеюсь, что вам понравилась моя статься, буду рат услышать критику и пожелания
Автор модели: Чернавин Леонид
Руководители: Кузнецов Валерий Евгеньевич,Козик Игорь Иванович
Автомодельная лаборатория "Колеса истории"

Немного юмора. Кто скажет, что это?

![]()
![]()
![]()
Название: ЗРПК "Тунгуска-М1" (SA-19 Grissom)
Тип: Автономный зенитный ракетно-пушечный комплекс 2К22М1.
Разработчик: КБП МОП, Россия
Производство: Ульяновский механический завод МРП (радиоприборный комплекс), Тульский механический завод МОП (пушечное вооружение), Кировский машиностроительный завод "Маяк" МОП (ракетное вооружение), ЛОМО МОП (прицельно-оптическое оборудование), Мытищинское ПО "Метровагонмаш" (шасси)
Элемент: боевая машина 2С6М "Hat Shot"
Боевой расчет, чел: 4
Шасси: ГМ-5975
Боевая масса, кг: 34000
Дальность обнаружения РЛС, км:
на высотах 25-3500 м: 16-19 (цель типа истребитель).
Дальность захвата на автосопровождение, км: н/д
Зона поиска РЛС, град:
по азимуту: 360
по углу места: н/д.
Зона сопровождения РЛС, град:
по азимуту: 120
по углу места: 0-15
Двигатель: дизель, В64-4
Мощность, л.с.: 740
Максимал. скорость движения, км/ч: 65
Дальность хода, км: 500
Вооружение:
8 х ЗУР 9М311 в ТПК (темп стрельбы – по результатам первой ЗУР – "одна за одной").
2 х ЗА 2А38 (темп стрельбы 4000..4800 выстр/мин)
боекомплект снарядов, шт: 1936
типы боеприпасов: ОФЗ и ОТ (4:1)
углы наведения ЗА, град.: -9 / +85
Предназначена для противовоздушной обороны мотострелковых и танковых частей и подразделений на марше и во всех видах боя, обеспечивает поражение низколетящих воздушных целей, в том числе "зависших" вертолетов. Принят на вооружение в середине восьмидесятых годов. Боевая машина имеет башенную установку с двумя двухствольными 30-мм автоматическими пушками и восемью пусковыми установками с зенитными управляемыми ракетами. По оценкам зарубежных специалистов комплекс "Тунгуска" не имеет аналогов в мире и является на сегодняшний день наиболее мощной зенитной системой такого класса.
Функционирование боевой машины 2С6 осуществлялось в основном автономно, но не исключалась и работа в системе управления средствами ПВО СВ.
При стрельбе по наземным движущимся целям применялся режим полуавтоматического или ручного наведения вооружения в упрежденную точку по дистанционной сетке прицела. После поиска, обнаружения и опознавания цели станция сопровождения переходила на ее автосопровождение по всем координатам.
При стрельбе зенитными пушками цифровая вычислительная система решала задачу встречи снаряда с целью и определяла зону поражения по данным, поступающим с выходных валов антенны станции сопровождения, из блока выделения сигналов ошибок по угловым координатам и с дальномера, а также из системы измерения углов качек и курса боевой машины. В случае постановки противником интенсивных помех – станции сопровождения по каналу измерения дальности (автодальномера) осуществлялся переход на ручное сопровождение цели по дальности, а при невозможности даже ручного сопровождения – на сопровождение цели по дальности от станции обнаружения или на ее инерционное сопровождении. При постановке интенсивных помех – сопровождение цели осуществлялось оптическим прицелом. При отсутствии видимости – инерционно (от цифровой вычислительной системы).
При стрельбе ракетами применялось сопровождение цели по угловым координатам с помощью оптического прицела. После пуска ЗУР попадала в поле зрения оптического пеленгатора аппаратуры выделения координат ракеты. По световому сигналу от трассера ракеты в аппаратуре вырабатывались угловые координаты ЗУР относительно линии визирования цели, которые поступали в вычислительную систему. Она вырабатывала команды управления ЗУР, поступающие в шифратор, где они кодировались в импульсные посылки и через передатчик станции сопровождения передавались на ракету. Движение ракеты практически на всей траектории происходило с отклонением от линии визирования цели на 1.5 д.у. для снижения вероятности попадания отстреливаемой целью оптической (тепловой) помехи-ловушки в поле зрения пеленгатора. Ввод ракеты на линию визирования цели начинался за 2-3 с до встречи с целью и заканчивался вблизи от нее. При приближении ЗУР к цели на расстояние 1000 м на ракету передавалась радиокоманда на взведение неконтактного датчика. По истечении времени, соответствующего пролету ракетой 1000 м от цели, боевая машина автоматически переводилась в готовность к пуску следующей ЗУР по цели.
Огонь из 30-мм пушек 2А38 может вестись с ходу или с места, а пуск ЗУР только с остановки. Система управления огнем – радиолокационно-оптическая. Обзорная РЛС с дальностью обнаружения целей 18 км расположена в задней части башни. Перед башней находится РЛС сопровождения целей с дальностью действия 13 км. Кроме РЛС в состав системы управления огнем входят цифровая ЭВМ, стабилизированный оптический прицел и углоизмерительные приборы. Время реакции комплекса 6-8 сек. Боевая машина имеет систему навигации, топопривязки и ориентирования для определения координат. Перезаряжание установки производится из специальной транспортно-заряжающей машины на шасси автомобиля КамАЗ-43101 контейнерным способом. Время перезаряжания ЗСУ ракетами и снарядами – 16 мин. Корпус и башня машины изготовлены из цельносварной брони и обеспечивают защиту экипажа от пуль и осколков. Механик-водитель размещается в передней части корпуса машины. Оператор РЛС, командир и стрелок располагаются в башне.
![]()
Александр! Ну и ну! Мне, так Очень понравилось! Вы где это взяли? По памяти написали или скопипастили? Из Википедии что ли. Это обсолютно правильное описание "Тунгуски", но . Она изображена на моих фотках ниже, в виде модели. Мне, даже довелось, по долгу службы, принимать участие в ее госиспытаниях в 1980г, когда ее принимали на вооружение.
А это не она. Найдите отличия. Подсказка – на парадах "он" передвигается на колесном шасси, восмиколесном Камазе.
Но я, честно говоря, имел ввиду не название, а то что это тоже модель, только 3D, выполненная в МАКСе. Вот как. С уважением!
